
Wykrywacze obiektów mogą identyfikować, które z znanego zbioru obiektów mogą być obecne, i podawać informacje o ich położeniu na danym obrazie lub w strumieniu wideo. Detektor obiektów jest trenowany do wykrywania obecności i lokalizacji wielu klas obiektów. Na przykład model może być trenowany na obrazach zawierających różne owoce wraz z etykietą określającą klasę owoców (np. jabłko, banan lub truskawka) oraz danymi określającymi, gdzie każdy obiekt pojawia się na obrazie. Więcej informacji o detektorach obiektów znajdziesz w przykładzie wykrywania obiektów.
Użyj interfejsu API biblioteki zadań ObjectDetector, aby wdrożyć w aplikacjach mobilnych własne detektory obiektów lub detektory wstępnie wytrenowane.
Kluczowe funkcje interfejsu ObjectDetector API
Przetwarzanie obrazu wejściowego, w tym obracanie, zmiana rozmiaru i konwersja przestrzeni kolorów.
Etykieta lokalizacji na mapie.
Próg wyniku do filtrowania wyników.
Wyniki wykrywania k najbardziej prawdopodobnych obiektów.
Lista dozwolonych i odrzuconych etykiet.
Obsługiwane modele detektorów obiektów
Te modele są zgodne z ObjectDetectorAPI.
Wstępnie wytrenowane modele wykrywania obiektów w TensorFlow Hub.
Modele utworzone przez AutoML Vision Edge Object Detection.
Modele utworzone przez TensorFlow Lite Model Maker do wykrywania obiektów.
modele niestandardowe, które spełniają wymagania dotyczące zgodności modeli;
Uruchamianie wnioskowania w Javie
Przykład użycia ObjectDetector w aplikacji na Androida znajdziesz w aplikacji referencyjnej do wykrywania obiektów.
Krok 1. Zaimportuj zależność Gradle i inne ustawienia
Skopiuj plik modelu .tflite do katalogu zasobów modułu Androida, w którym będzie uruchamiany model. Określ, że plik nie powinien być kompresowany, i dodaj bibliotekę TensorFlow Lite do pliku build.gradle modułu:
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
Krok 2. Korzystanie z modelu
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
Więcej opcji konfigurowania ObjectDetector znajdziesz w kodzie źródłowym i dokumentacji Javadoc.
Uruchamianie wnioskowania na iOS
Krok 1. Zainstaluj zależności
Biblioteka zadań obsługuje instalację za pomocą CocoaPods. Upewnij się, że w systemie jest zainstalowany CocoaPods. Instrukcje znajdziesz w przewodniku instalacji CocoaPods.
Szczegółowe informacje o dodawaniu podów do projektu w Xcode znajdziesz w przewodniku po CocoaPods.
Dodaj pod TensorFlowLiteTaskVision do pliku Podfile.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
Upewnij się, że model .tflite, którego będziesz używać do wnioskowania, znajduje się w pakiecie aplikacji.
Krok 2. Korzystanie z modelu
Swift
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objective-C
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
Więcej opcji konfigurowania TFLObjectDetector znajdziesz w kodzie źródłowym.
Uruchamianie wnioskowania w Pythonie
Krok 1. Zainstaluj pakiet pip
pip install tflite-support
Krok 2. Korzystanie z modelu
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
Więcej opcji konfigurowania ObjectDetector znajdziesz w kodzie źródłowym.
Uruchamianie wnioskowania w C++
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
Więcej opcji konfigurowania ObjectDetector znajdziesz w kodzie źródłowym.
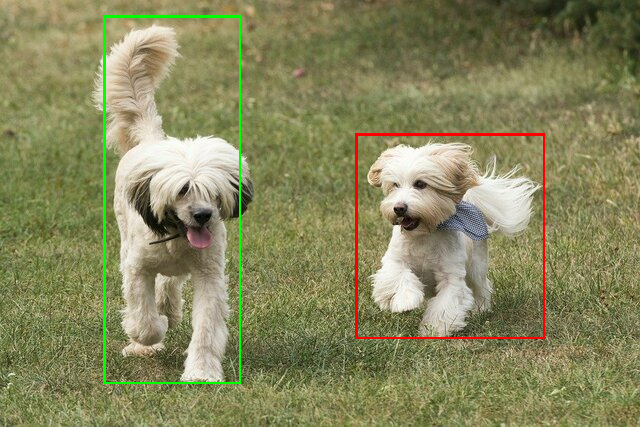
Przykładowe wyniki
Oto przykład wyników wykrywania modelu ssd mobilenet v1 z TensorFlow Hub.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
Wyrenderuj ramki ograniczające na obrazie wejściowym:
Wypróbuj proste narzędzie demonstracyjne CLI dla ObjectDetector z własnym modelem i danymi testowymi.
Wymagania dotyczące zgodności modeli
Interfejs ObjectDetector API oczekuje modelu TFLite z obowiązkowymi metadanymi modelu TFLite. Zobacz przykłady tworzenia metadanych dla detektorów obiektów za pomocą interfejsu API do tworzenia metadanych TensorFlow Lite.
Zgodne modele detektorów obiektów powinny spełniać te wymagania:
Tensor obrazu wejściowego: (kTfLiteUInt8/kTfLiteFloat32)
- obraz wejściowy o rozmiarze
[batch x height x width x channels]. - wnioskowanie zbiorcze nie jest obsługiwane (
batchmusi mieć wartość 1). - obsługiwane są tylko dane wejściowe RGB (wartość
channelsmusi wynosić 3); - Jeśli typ to kTfLiteFloat32, do metadanych muszą być dołączone opcje normalizacji, aby można było normalizować dane wejściowe.
- obraz wejściowy o rozmiarze
Tensory wyjściowe muszą być 4 wyjściami operacji
DetectionPostProcess, czyli:- Tensor lokalizacji (kTfLiteFloat32)
- tensor o rozmiarze
[1 x num_results x 4], wewnętrzna tablica reprezentująca ramki ograniczające w formacie [góra, lewo, prawo, dół]. - Właściwości BoundingBoxProperties muszą być dołączone do metadanych i muszą określać
type=BOUNDARIESoraz `coordinate_type=RATIO. Tensor klas (kTfLiteFloat32)
tensor o rozmiarze
[1 x num_results], gdzie każda wartość reprezentuje indeks klasy w postaci liczby całkowitej.opcjonalne (ale zalecane) mapy etykiet można dołączyć jako pliki powiązane typu TENSOR_VALUE_LABELS, zawierające po jednej etykiecie w wierszu. Zobacz przykładowy plik etykiet. Pierwszy taki element AssociatedFile (jeśli występuje) jest używany do wypełnienia pola
class_namew wynikach. Poledisplay_namejest wypełniane na podstawie pola AssociatedFile (jeśli istnieje), którego ustawienia regionalne są zgodne z polemdisplay_names_localepolaObjectDetectorOptionsużytego podczas tworzenia (domyślnie „en”, czyli język angielski). Jeśli żadne z nich nie są dostępne, wypełnione zostanie tylko poleindexw wynikach.Tensor wyników (kTfLiteFloat32)
tensor o rozmiarze
[1 x num_results], którego każda wartość reprezentuje wynik wykrytego obiektu.Liczba tensora wykrywania (kTfLiteFloat32)
liczba całkowita num_results jako tensor o rozmiarze
[1].