
Detektorët e objekteve mund të identifikojnë se cili nga një grup i njohur objektesh mund të jetë i pranishëm dhe të japin informacion në lidhje me pozicionet e tyre brenda imazhit të dhënë ose një transmetimi video. Një detektor objektesh është i trajnuar për të zbuluar praninë dhe vendndodhjen e klasave të shumta të objekteve. Për shembull, një model mund të trajnohet me imazhe që përmbajnë copa të ndryshme frutash, së bashku me një etiketë që specifikon klasën e frutave që ato përfaqësojnë (p.sh. një mollë, një banane ose një luleshtrydhe), dhe të dhëna që specifikojnë se ku shfaqet secili objekt në imazh. Shihni shembullin e zbulimit të objekteve për më shumë informacion në lidhje me detektorët e objekteve.
Përdorni API-n e ObjectDetector të Bibliotekës së Detyrave për të vendosur detektorët tuaj të personalizuar të objekteve ose ata të parapërgatitur në aplikacionet tuaja mobile.
Karakteristikat kryesore të API-t ObjectDetector
Përpunimi i imazhit hyrës, duke përfshirë rrotullimin, ndryshimin e madhësisë dhe konvertimin e hapësirës së ngjyrave.
Etiketo vendndodhjen e hartës.
Pragu i pikëve për të filtruar rezultatet.
Rezultatet e zbulimit Top-k.
Etiketo listën e lejimeve dhe listën e mohimeve.
Modelet e mbështetura të detektorëve të objekteve
Modelet e mëposhtme garantohen të jenë të pajtueshme me API-n ObjectDetector .
Modelet e para-trajnuara të zbulimit të objekteve në TensorFlow Hub .
Modele të krijuara nga AutoML Vision Edge Object Detection .
Modele të krijuara nga TensorFlow Lite Model Maker për detektor objektesh .
Modele të personalizuara që plotësojnë kërkesat e përputhshmërisë së modelit .
Ekzekutoni përfundimin në Java
Shihni aplikacionin referues të Zbulimit të Objekteve për një shembull se si të përdorni ObjectDetector në një aplikacion Android.
Hapi 1: Importoni varësinë e Gradle dhe cilësimet e tjera
Kopjoni skedarin e modelit .tflite në direktorinë e aseteve të modulit Android ku do të ekzekutohet modeli. Specifikoni që skedari nuk duhet të kompresohet dhe shtoni bibliotekën TensorFlow Lite në skedarin build.gradle të modulit:
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
Hapi 2: Përdorimi i modelit
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
Shihni kodin burimor dhe javadoc për më shumë opsione për të konfiguruar ObjectDetector .
Ekzekutoni përfundimin në iOS
Hapi 1: Instaloni varësitë
Biblioteka e Detyrave mbështet instalimin duke përdorur CocoaPods. Sigurohuni që CocoaPods është instaluar në sistemin tuaj. Ju lutemi shihni udhëzuesin e instalimit të CocoaPods për udhëzime.
Ju lutemi shihni udhëzuesin e CocoaPods për detaje mbi shtimin e pod-eve në një projekt Xcode.
Shtoni pod-in TensorFlowLiteTaskVision në Podfile.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
Sigurohuni që modeli .tflite që do të përdorni për nxjerrjen e përfundimeve është i pranishëm në paketën e aplikacionit tuaj.
Hapi 2: Përdorimi i modelit
I shpejtë
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objektivi-C
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
Shihni kodin burimor për më shumë opsione për të konfiguruar TFLObjectDetector .
Ekzekutoni përfundimin në Python
Hapi 1: Instaloni paketën pip
pip install tflite-support
Hapi 2: Përdorimi i modelit
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
Shihni kodin burimor për më shumë opsione për të konfiguruar ObjectDetector .
Ekzekutoni përfundimin në C++
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
Shihni kodin burimor për më shumë opsione për të konfiguruar ObjectDetector .
Rezultatet e shembujve
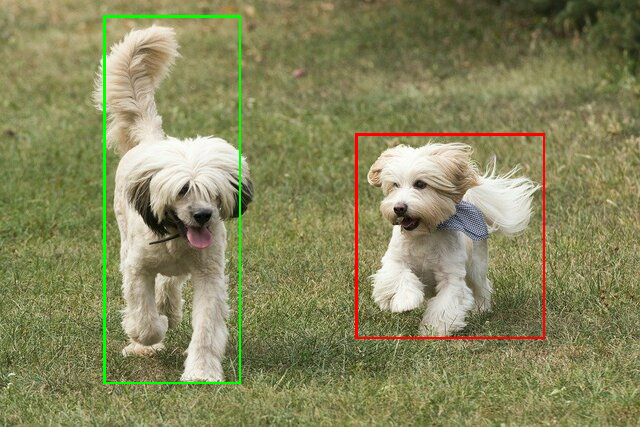
Ja një shembull i rezultateve të zbulimit të ssd mobilenet v1 nga TensorFlow Hub.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
Renderoni kutitë kufizuese në imazhin hyrës:
Provoni mjetin e thjeshtë demo CLI për ObjectDetector me modelin tuaj dhe të dhënat e testimit.
Kërkesat e përputhshmërisë së modelit
API-ja e ObjectDetector pret një model TFLite me Metadata të Modelit TFLite të detyrueshme. Shihni shembuj të krijimit të metadatave për detektorët e objekteve duke përdorur API-në e Shkruesit të Metadatave TensorFlow Lite .
Modelet e pajtueshme të detektorëve të objekteve duhet të plotësojnë kërkesat e mëposhtme:
Tensori i imazhit të hyrjes: (kTfLiteUInt8/kTfLiteFloat32)
- madhësia e hyrjes së imazhit
[batch x height x width x channels]. - Përfundimi i grupit nuk mbështetet (
batchduhet të jetë 1). - Mbështeten vetëm hyrjet RGB (
channelsduhet të jenë 3). - Nëse lloji është kTfLiteFloat32, NormalizationOptions duhet t'i bashkëngjiten meta të dhënave për normalizimin e hyrjes.
- madhësia e hyrjes së imazhit
Tensorët e daljes duhet të jenë 4 daljet e një
DetectionPostProcess, dmth:- Tensori i vendndodhjeve (kTfLiteFloat32)
- tensor me madhësi
[1 x num_results x 4], vargu i brendshëm që përfaqëson kutitë kufizuese në formën [sipër, majtas, djathtas, poshtë]. - BoundingBoxProperties duhet t'i bashkëngjiten meta të dhënave dhe duhet të specifikojnë
type=BOUNDARIESdhe `coordinate_type=RATIO. Tensori i klasave (kTfLiteFloat32)
tenzor me madhësi
[1 x num_results], ku secila vlerë përfaqëson indeksin e numrit të plotë të një klase.Hartat opsionale (por të rekomanduara) të etiketave mund të bashkëngjiten si AssociatedFile-s me llojin TENSOR_VALUE_LABELS, që përmbajnë një etiketë për rresht. Shihni shembullin e skedarit të etiketës . AssociatedFile i parë i tillë (nëse ka) përdoret për të mbushur fushën
class_nametë rezultateve. Fushadisplay_nameplotësohet nga AssociatedFile (nëse ka) lokalizimi i të cilit përputhet me fushëndisplay_names_localetëObjectDetectorOptionstë përdorur në kohën e krijimit ("en" si parazgjedhje, dmth. Anglisht). Nëse asnjëra prej këtyre nuk është e disponueshme, vetëm fusha eindextë rezultateve do të plotësohet.Tensori i rezultateve (kTfLiteFloat32)
tenzor me madhësi
[1 x num_results], ku secila vlerë përfaqëson rezultatin e objektit të zbuluar.Numri i tensorit të zbulimit (kTfLiteFloat32)
numër i plotë num_results si një tenzor me madhësi
[1].