
MediaPipe 객체 감지기 태스크를 사용하면 여러 객체 클래스의 존재와 위치를 감지할 수 있습니다. 이 안내에서는 Python에서 객체 감지기 작업을 사용하는 방법을 보여줍니다. 이 안내에 설명된 코드 예시는 GitHub에서 확인할 수 있습니다.
웹 데모를 통해 이 작업이 작동하는 모습을 확인할 수 있습니다. 이 태스크의 기능, 모델, 구성 옵션에 관한 자세한 내용은 개요를 참고하세요.
코드 예
객체 감지기의 예시 코드는 참고용으로 Python에서 이 작업을 완전히 구현한 코드를 제공합니다. 이 코드는 이 작업을 테스트하고 자체 텍스트 분류 앱을 빌드하는 데 도움이 됩니다. 웹브라우저만 사용하여 객체 감지기 예시 코드를 보고, 실행하고, 수정할 수 있습니다.
Raspberry Pi용 객체 감지기를 구현하는 경우 Raspberry Pi 예시 앱을 참고하세요.
설정
이 섹션에서는 특히 객체 감지기를 사용하기 위해 개발 환경 및 코드 프로젝트를 설정하는 주요 단계를 설명합니다. 플랫폼 버전 요구사항을 비롯하여 MediaPipe 작업을 사용하기 위한 개발 환경 설정에 관한 일반적인 정보는 Python 설정 가이드를 참고하세요.
패키지
객체 감지기 태스크에는 mediapipe pip 패키지가 필요합니다. 다음 명령어를 사용하여 필요한 패키지를 설치할 수 있습니다.
$ python -m pip install mediapipe
가져오기
다음 클래스를 가져와서 객체 감지기 작업 함수에 액세스합니다.
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
모델
MediaPipe 객체 감지기 태스크에는 이 태스크와 호환되는 학습된 모델이 필요합니다. 객체 감지기에 사용할 수 있는 학습된 모델에 관한 자세한 내용은 작업 개요 모델 섹션을 참고하세요.
모델을 선택하고 다운로드한 다음 로컬 디렉터리에 저장합니다.
model_path = '/absolute/path/to/lite-model_efficientdet_lite0_detection_metadata_1.tflite'
BaseOptions 객체 model_asset_path 매개변수를 사용하여 사용할 모델의 경로를 지정합니다. 코드 예시는 다음 섹션을 참고하세요.
할 일 만들기
create_from_options 함수를 사용하여 태스크를 만듭니다. create_from_options 함수는 실행 모드, 표시 이름 언어, 결과 최대 개수, 신뢰도 기준점, 카테고리 허용 목록, 거부 목록을 비롯한 구성 옵션을 허용합니다. 구성 옵션을 설정하지 않으면 작업에서 기본값을 사용합니다. 구성 옵션에 관한 자세한 내용은 구성 옵션 섹션을 참고하세요.
객체 감지기 태스크는 정지 이미지, 동영상 파일, 라이브 동영상 스트림 등 여러 입력 데이터 유형을 지원합니다. 입력 데이터 유형에 해당하는 탭을 선택하여 태스크를 만들고 추론을 실행하는 방법을 알아봅니다.
이미지
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions ObjectDetector = mp.tasks.vision.ObjectDetector ObjectDetectorOptions = mp.tasks.vision.ObjectDetectorOptions VisionRunningMode = mp.tasks.vision.RunningMode options = ObjectDetectorOptions( base_options=BaseOptions(model_asset_path='/path/to/model.tflite'), max_results=5, running_mode=VisionRunningMode.IMAGE) with ObjectDetector.create_from_options(options) as detector: # The detector is initialized. Use it here. # ...
동영상
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions ObjectDetector = mp.tasks.vision.ObjectDetector ObjectDetectorOptions = mp.tasks.vision.ObjectDetectorOptions VisionRunningMode = mp.tasks.vision.RunningMode options = ObjectDetectorOptions( base_options=BaseOptions(model_asset_path='/path/to/model.tflite'), max_results=5, running_mode=VisionRunningMode.VIDEO) with ObjectDetector.create_from_options(options) as detector: # The detector is initialized. Use it here. # ...
실시간 스트림
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions DetectionResult = mp.tasks.components.containers.detections.DetectionResult ObjectDetector = mp.tasks.vision.ObjectDetector ObjectDetectorOptions = mp.tasks.vision.ObjectDetectorOptions VisionRunningMode = mp.tasks.vision.RunningMode def print_result(result: DetectionResult, output_image: mp.Image, timestamp_ms: int): print('detection result: {}'.format(result)) options = ObjectDetectorOptions( base_options=BaseOptions(model_asset_path='/path/to/model.tflite'), running_mode=VisionRunningMode.LIVE_STREAM, max_results=5, result_callback=print_result) with ObjectDetector.create_from_options(options) as detector: # The detector is initialized. Use it here. # ...
이미지와 함께 사용할 객체 감지기를 만드는 전체 예시는 코드 예시를 참고하세요.
구성 옵션
이 작업에는 Python 애플리케이션의 다음과 같은 구성 옵션이 있습니다.
| 옵션 이름 | 설명 | 값 범위 | 기본값 |
|---|---|---|---|
running_mode |
태스크의 실행 모드를 설정합니다. 모드는 세 가지입니다. IMAGE: 단일 이미지 입력의 모드입니다. 동영상: 동영상의 디코딩된 프레임 모드입니다. LIVE_STREAM: 카메라와 같은 입력 데이터의 라이브 스트림 모드입니다. 이 모드에서는 결과를 비동기식으로 수신할 리스너를 설정하려면 resultListener를 호출해야 합니다. |
{IMAGE, VIDEO, LIVE_STREAM} |
IMAGE |
display_names |
가능한 경우 태스크 모델의 메타데이터에 제공된 표시 이름에 사용할 라벨의 언어를 설정합니다. 기본값은 영어의 경우 en입니다. TensorFlow Lite Metadata Writer API를 사용하여 맞춤 모델의 메타데이터에 현지화된 라벨을 추가할 수 있습니다.
|
언어 코드 | en |
max_results |
반환할 선택적 최대 점수의 감지 결과 수를 설정합니다. | 모든 양수 | -1 (모든 결과가 반환됨) |
score_threshold |
모델 메타데이터에 제공된 값 (있는 경우)을 재정의하는 예측 점수 기준점을 설정합니다. 이 값 미만의 결과는 거부됩니다. | 모든 부동 소수점 수 | 설정되지 않음 |
category_allowlist |
허용되는 카테고리 이름의 선택적 목록을 설정합니다. 비어 있지 않으면 이 세트에 카테고리 이름이 없는 감지 결과가 필터링됩니다. 중복 또는 알 수 없는 카테고리 이름은 무시됩니다.
이 옵션은 category_denylist와 상호 배타적이며 둘 다 사용하면 오류가 발생합니다. |
모든 문자열 | 설정되지 않음 |
category_denylist |
허용되지 않는 카테고리 이름의 선택적 목록을 설정합니다. 비어 있지 않으면 이 세트에 카테고리 이름이 있는 감지 결과가 필터링됩니다. 중복 또는 알 수 없는 카테고리 이름은 무시됩니다. 이 옵션은 category_allowlist와 상호 배타적이며 둘 다 사용하면 오류가 발생합니다. |
모든 문자열 | 설정되지 않음 |
데이터 준비
입력을 이미지 파일 또는 numpy 배열로 준비한 다음 mediapipe.Image 객체로 변환합니다. 입력이 동영상 파일 또는 웹캠의 라이브 스트림인 경우 OpenCV와 같은 외부 라이브러리를 사용하여 입력 프레임을 numpy 배열로 로드할 수 있습니다.
다음 예에서는 사용 가능한 각 데이터 유형에 대해 처리할 데이터를 준비하는 방법을 설명하고 보여줍니다.
이미지
import mediapipe as mp # Load the input image from an image file. mp_image = mp.Image.create_from_file('/path/to/image') # Load the input image from a numpy array. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_image)
동영상
import mediapipe as mp # Use OpenCV’s VideoCapture to load the input video. # Load the frame rate of the video using OpenCV’s CV_CAP_PROP_FPS # You’ll need it to calculate the timestamp for each frame. # Loop through each frame in the video using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
실시간 스트림
import mediapipe as mp # Use OpenCV’s VideoCapture to start capturing from the webcam. # Create a loop to read the latest frame from the camera using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
태스크 실행
감지 함수 중 하나를 호출하여 추론을 트리거할 수 있습니다. 객체 감지기 작업은 입력 이미지 또는 프레임 내에서 감지된 객체를 반환합니다.
이미지
# Perform object detection on the provided single image. detection_result = detector.detect(mp_image)
동영상
# Calculate the timestamp of the current frame frame_timestamp_ms = 1000 * frame_index / video_file_fps # Perform object detection on the video frame. detection_result = detector.detect_for_video(mp_image, frame_timestamp_ms)
실시간 스트림
# Send the latest frame to perform object detection. # Results are sent to the `result_callback` provided in the `ObjectDetectorOptions`. detector.detect_async(mp_image, frame_timestamp_ms)
이미지에서 객체 감지기를 실행하는 전체 예시는 코드 예시를 참고하세요.
다음에 유의하세요.
- 동영상 모드 또는 라이브 스트림 모드에서 실행할 때는 객체 감지기 태스크에 입력 프레임의 타임스탬프도 제공해야 합니다.
- 이미지 또는 동영상 모델에서 실행되면 객체 감지기 작업은 입력 이미지 또는 프레임 처리를 완료할 때까지 현재 스레드를 차단합니다.
- 라이브 스트림 모드에서 실행하면 객체 감지기 작업이 현재 스레드를 차단하지 않고 즉시 반환됩니다. 입력 프레임 처리를 완료할 때마다 감지 결과와 함께 결과 리스너를 호출합니다. 객체 감지기 작업이 다른 프레임을 처리하는 데 바쁠 때 감지 함수가 호출되면 새 입력 프레임이 무시됩니다.
결과 처리 및 표시
추론을 실행하면 객체 감지기 작업은 입력 이미지에서 찾은 객체를 설명하는 ObjectDetectionResult 객체를 반환합니다.
다음은 이 태스크의 출력 데이터 예시입니다.
ObjectDetectorResult:
Detection #0:
Box: (x: 355, y: 133, w: 190, h: 206)
Categories:
index : 17
score : 0.73828
class name : dog
Detection #1:
Box: (x: 103, y: 15, w: 138, h: 369)
Categories:
index : 17
score : 0.73047
class name : dog
다음 이미지는 태스크 출력의 시각화를 보여줍니다.
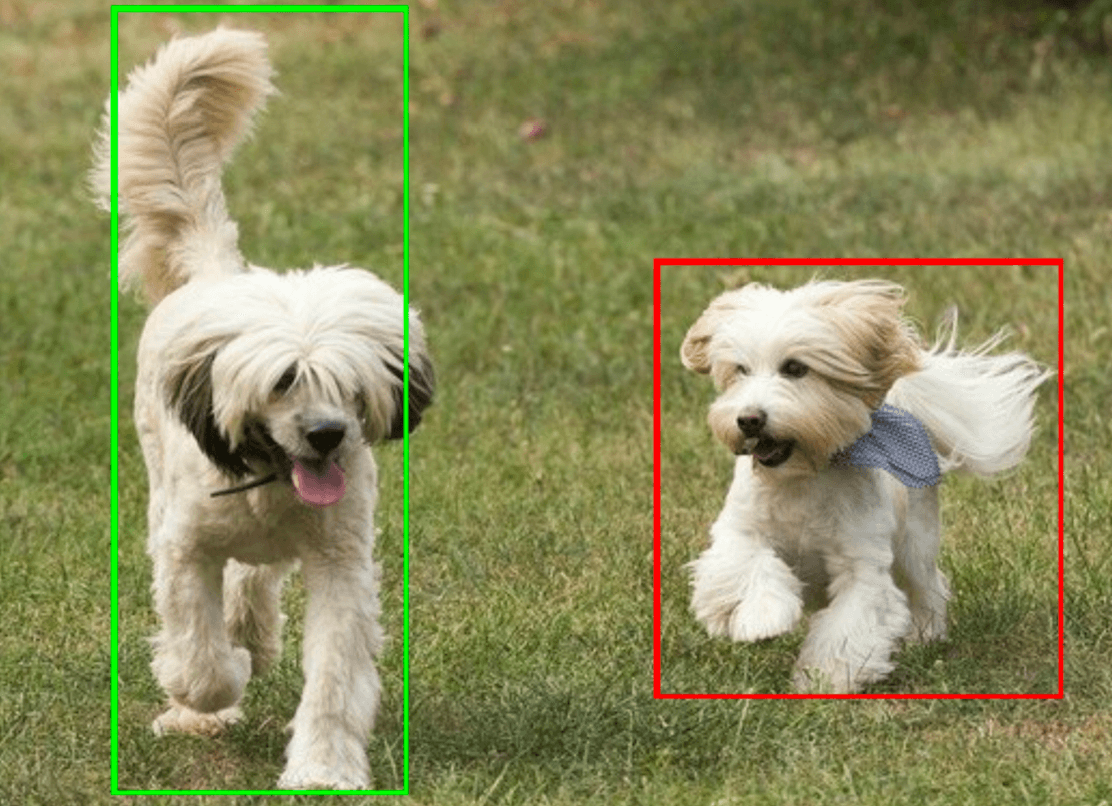
객체 감지기 예시 코드는 태스크에서 반환된 감지 결과를 표시하는 방법을 보여줍니다. 자세한 내용은 코드 예시를 참고하세요.