
آشکارسازهای شیء میتوانند تشخیص دهند که کدام یک از مجموعه اشیاء شناخته شده ممکن است وجود داشته باشند و اطلاعاتی در مورد موقعیت آنها در تصویر یا جریان ویدیویی ارائه دهند. یک آشکارساز شیء برای تشخیص حضور و مکان چندین کلاس از اشیاء آموزش داده میشود. به عنوان مثال، یک مدل ممکن است با تصاویری که حاوی قطعات مختلف میوه هستند، همراه با برچسبی که کلاس میوهای را که نشان میدهند (مثلاً سیب، موز یا توت فرنگی) مشخص میکند، و دادههایی که مشخص میکنند هر شیء در کجای تصویر ظاهر میشود، آموزش داده شود. برای اطلاعات بیشتر در مورد آشکارسازهای شیء، به مثال تشخیص شیء مراجعه کنید.
از API مربوط به کتابخانه وظایف (Task Library ObjectDetector API) برای پیادهسازی آشکارسازهای شیء سفارشی یا آشکارسازهای از پیش آموزشدیده در برنامههای تلفن همراه خود استفاده کنید.
ویژگیهای کلیدی API مربوط به ObjectDetector
پردازش تصویر ورودی، شامل چرخش، تغییر اندازه و تبدیل فضای رنگ.
برچسبگذاری محل نقشه.
آستانه امتیاز برای فیلتر کردن نتایج.
نتایج تشخیص k برتر.
برچسبگذاری لیست مجاز و لیست ممنوع.
مدلهای پشتیبانیشدهی آشکارساز شیء
مدلهای زیر تضمین میکنند که با API ObjectDetector سازگار باشند.
مدلهای ایجاد شده توسط AutoML Vision Edge Object Detection .
مدلهای ایجاد شده توسط TensorFlow Lite Model Maker برای آشکارساز شیء .
مدلهای سفارشی که الزامات سازگاری مدل را برآورده میکنند.
اجرای استنتاج در جاوا
برای مثالی از نحوه استفاده از ObjectDetector در یک برنامه اندروید، به برنامه مرجع تشخیص شیء مراجعه کنید.
مرحله ۱: وارد کردن وابستگی Gradle و سایر تنظیمات
فایل مدل .tflite را در دایرکتوری assets ماژول اندروید که مدل در آن اجرا خواهد شد، کپی کنید. مشخص کنید که فایل نباید فشرده شود و کتابخانه TensorFlow Lite را به فایل build.gradle ماژول اضافه کنید:
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
مرحله ۲: استفاده از مدل
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
برای گزینههای بیشتر برای پیکربندی ObjectDetector به کد منبع و javadoc مراجعه کنید.
اجرای استنتاج در iOS
مرحله ۱: نصب وابستگیها
کتابخانه وظایف (Task Library) از نصب با استفاده از CocoaPods پشتیبانی میکند. مطمئن شوید که CocoaPods روی سیستم شما نصب شده است. لطفاً برای دستورالعملها به راهنمای نصب CocoaPods مراجعه کنید.
برای جزئیات بیشتر در مورد افزودن پاد به یک پروژه Xcode، لطفاً به راهنمای CocoaPods مراجعه کنید.
غلاف TensorFlowLiteTaskVision را در Podfile اضافه کنید.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
مطمئن شوید که مدل .tflite که برای استنتاج استفاده خواهید کرد، در بسته برنامه شما موجود است.
مرحله ۲: استفاده از مدل
سویفت
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
هدف-سی
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
برای گزینههای بیشتر برای پیکربندی TFLObjectDetector به کد منبع مراجعه کنید.
اجرای استنتاج در پایتون
مرحله ۱: نصب بسته pip
pip install tflite-support
مرحله ۲: استفاده از مدل
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
برای گزینههای بیشتر برای پیکربندی ObjectDetector به کد منبع مراجعه کنید.
اجرای استنتاج در ++C
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
برای گزینههای بیشتر برای پیکربندی ObjectDetector به کد منبع مراجعه کنید.
نتایج مثال
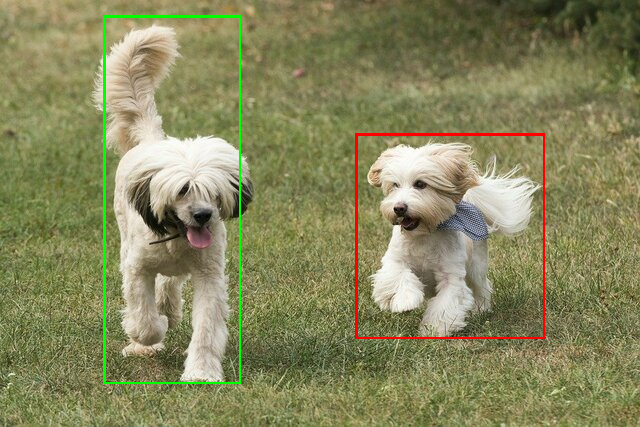
در اینجا مثالی از نتایج تشخیص ssd mobilenet v1 از TensorFlow Hub آورده شده است.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
کادرهای مرزی را روی تصویر ورودی رندر کنید:
ابزار نمایشی ساده CLI برای ObjectDetector را با مدل و دادههای آزمایشی خودتان امتحان کنید.
الزامات سازگاری مدل
رابط برنامهنویسی کاربردی (API) ObjectDetector ) انتظار یک مدل TFLite با فراداده (Metadata) مدل TFLite اجباری را دارد. نمونههایی از ایجاد فراداده برای آشکارسازهای شیء با استفاده از API نویسنده فراداده TensorFlow Lite را ببینید.
مدلهای آشکارساز شیء سازگار باید الزامات زیر را برآورده کنند:
تانسور تصویر ورودی: (kTfLiteUInt8/kTfLiteFloat32)
- ورودی تصویر با اندازه
[batch x height x width x channels]. - استنتاج دستهای پشتیبانی نمیشود (
batchباید ۱ باشد). - فقط ورودیهای RGB پشتیبانی میشوند (
channelsباید ۳ باشد). - اگر نوع kTfLiteFloat32 باشد، برای نرمالسازی ورودی، لازم است NormalizationOptions به فرادادهها متصل شود.
- ورودی تصویر با اندازه
تانسورهای خروجی باید 4 خروجی یک عملیات
DetectionPostProcessباشند، یعنی:- تانسور مکانها (kTfLiteFloat32)
- تانسوری با اندازه
[1 x num_results x 4]، آرایه داخلی که نشاندهنده جعبههای مرزی به شکل [بالا، چپ، راست، پایین] است. - لازم است BoundingBoxProperties به فرادادهها پیوست شوند و باید
type=BOUNDARIESو `coordinate_type=RATIO` را مشخص کنند. کلاسهای تانسور (kTfLiteFloat32)
تانسوری با اندازه
[1 x num_results]که هر مقدار نشاندهنده اندیس عدد صحیح یک کلاس است.نقشه(های) برچسب اختیاری (اما توصیهشده) میتوانند به عنوان AssociatedFile-s با نوع TENSOR_VALUE_LABELS پیوست شوند که شامل یک برچسب در هر خط است. به فایل برچسب نمونه مراجعه کنید. اولین AssociatedFile از این نوع (در صورت وجود) برای پر کردن فیلد
class_nameنتایج استفاده میشود. فیلدdisplay_nameاز AssociatedFile (در صورت وجود) پر میشود که زبان محلی آن با فیلدdisplay_names_localeازObjectDetectorOptionsاستفاده شده در زمان ایجاد ("en" به طور پیشفرض، یعنی انگلیسی) مطابقت دارد. اگر هیچ یک از این موارد در دسترس نباشد، فقط فیلدindexنتایج پر خواهد شد.تانسور امتیازها (kTfLiteFloat32)
تانسوری با اندازه
[1 x num_results]که هر مقدار نشان دهنده امتیاز شیء شناسایی شده است.تعداد تانسور تشخیص (kTfLiteFloat32)
عدد صحیح num_results به عنوان یک تانسور با اندازه
[1].