
MediaPipe Hand Landmarker 工作可讓您偵測圖片中的手部地標。本操作說明將說明如何使用 Python 搭配手部標記工具。您可以在 GitHub 上找到這些操作說明中所述的程式碼範例。
如要進一步瞭解這項工作的功能、模型和設定選項,請參閱總覽。
程式碼範例
手部標記器的範例程式碼提供了 Python 中此工作的完整實作方式,供您參考。這段程式碼可協助您測試這項工作,並開始建構自己的手部地標偵測器。您只需使用網頁瀏覽器,即可查看、執行及編輯 手部地標標示器範例程式碼。
如果您要為 Raspberry Pi 實作手部標記器,請參閱 Raspberry Pi 範例應用程式。
設定
本節將說明設定開發環境和程式碼專案的關鍵步驟,以便使用手勢標記器。如要進一步瞭解如何設定開發環境以使用 MediaPipe 工作,包括平台版本需求,請參閱 Python 設定指南。
套件
MediaPipe Hand Landmarker 工作需要 mediapipe PyPI 套件。您可以透過下列方式安裝及匯入這些依附元件:
$ python -m pip install mediapipe
匯入
匯入下列類別,以存取手部標記器工作函式:
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
型號
MediaPipe Hand Landmarker 工作需要訓練的模型,且必須與此工作相容。如要進一步瞭解手部標記器可用的訓練模型,請參閱工作總覽的「模型」一節。
選取並下載模型,然後將其儲存在本機目錄中:
model_path = '/absolute/path/to/gesture_recognizer.task'
使用 BaseOptions 物件的 model_asset_path 參數,指定要使用的模型路徑。如需程式碼範例,請參閱下一節。
建立工作
MediaPipe 手勢標記器工作會使用 create_from_options 函式設定工作。create_from_options 函式會接受設定選項的值,以便處理。如要進一步瞭解設定選項,請參閱「設定選項」。
以下程式碼示範如何建構及設定此工作。
這些範例也說明瞭圖片、影片檔案和直播的任務建構變化。
圖片
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions HandLandmarker = mp.tasks.vision.HandLandmarker HandLandmarkerOptions = mp.tasks.vision.HandLandmarkerOptions VisionRunningMode = mp.tasks.vision.RunningMode # Create a hand landmarker instance with the image mode: options = HandLandmarkerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.IMAGE) with HandLandmarker.create_from_options(options) as landmarker: # The landmarker is initialized. Use it here. # ...
影片
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions HandLandmarker = mp.tasks.vision.HandLandmarker HandLandmarkerOptions = mp.tasks.vision.HandLandmarkerOptions VisionRunningMode = mp.tasks.vision.RunningMode # Create a hand landmarker instance with the video mode: options = HandLandmarkerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.VIDEO) with HandLandmarker.create_from_options(options) as landmarker: # The landmarker is initialized. Use it here. # ...
直播
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions HandLandmarker = mp.tasks.vision.HandLandmarker HandLandmarkerOptions = mp.tasks.vision.HandLandmarkerOptions HandLandmarkerResult = mp.tasks.vision.HandLandmarkerResult VisionRunningMode = mp.tasks.vision.RunningMode # Create a hand landmarker instance with the live stream mode: def print_result(result: HandLandmarkerResult, output_image: mp.Image, timestamp_ms: int): print('hand landmarker result: {}'.format(result)) options = HandLandmarkerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.LIVE_STREAM, result_callback=print_result) with HandLandmarker.create_from_options(options) as landmarker: # The landmarker is initialized. Use it here. # ...
如需建立手部標記以供圖片使用,請參閱程式碼範例。
設定選項
此工作包含下列 Python 應用程式的設定選項:
| 選項名稱 | 說明 | 值範圍 | 預設值 |
|---|---|---|---|
running_mode |
設定工作執行模式。共有三種模式: IMAGE:單一圖片輸入模式。 VIDEO:影片解碼影格模式。 LIVE_STREAM:輸入資料 (例如來自攝影機的資料) 的直播模式。在這個模式中,必須呼叫 resultListener,才能設定事件監聽器,以非同步方式接收結果。 |
{IMAGE, VIDEO, LIVE_STREAM} |
IMAGE |
num_hands |
手部地標偵測器偵測到的手部數量上限。 | Any integer > 0 |
1 |
min_hand_detection_confidence |
在手掌偵測模型中,手部偵測的最低信賴分數,才會視為成功。 | 0.0 - 1.0 |
0.5 |
min_hand_presence_confidence |
手部地標偵測模型中手部存在分數的最低可信度分數。在影片模式和直播模式中,如果手勢地標模型的手勢存在可信度分數低於此閾值,手勢地標偵測器就會觸發手掌偵測模型。否則,輕量手勢追蹤演算法會判斷手的位置,以便後續的標記偵測。 | 0.0 - 1.0 |
0.5 |
min_tracking_confidence |
手部追蹤系統判定為成功的最低可信度分數。這是目前影格和上一個影格中手的定界框交併比閾值。在 Hand Landmarker 的影片模式和串流模式中,如果追蹤失敗,Hand Landmarker 會觸發手部偵測。否則系統會略過手勢偵測。 | 0.0 - 1.0 |
0.5 |
result_callback |
在手部標記處於即時串流模式時,將結果事件監聽器設為以非同步方式接收偵測結果。只有在執行模式設為 LIVE_STREAM 時才適用 |
不適用 | 不適用 |
準備資料
將輸入內容設為圖片檔案或 Numpy 陣列,然後轉換為 mediapipe.Image 物件。如果輸入內容是網路攝影機的影片檔案或直播內容,您可以使用 OpenCV 等外部程式庫,將輸入影格載入為 Numpy 陣列。
圖片
import mediapipe as mp # Load the input image from an image file. mp_image = mp.Image.create_from_file('/path/to/image') # Load the input image from a numpy array. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_image)
影片
import mediapipe as mp # Use OpenCV’s VideoCapture to load the input video. # Load the frame rate of the video using OpenCV’s CV_CAP_PROP_FPS # You’ll need it to calculate the timestamp for each frame. # Loop through each frame in the video using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
直播
import mediapipe as mp # Use OpenCV’s VideoCapture to start capturing from the webcam. # Create a loop to read the latest frame from the camera using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
執行工作
Hand Landmarker 會使用 detect、detect_for_video 和 detect_async 函式觸發推論。針對手部地標偵測,這包括預先處理輸入資料、偵測圖片中的手部,以及偵測手部地標。
以下程式碼示範如何使用工作模型執行處理作業。
圖片
# Perform hand landmarks detection on the provided single image. # The hand landmarker must be created with the image mode. hand_landmarker_result = landmarker.detect(mp_image)
影片
# Perform hand landmarks detection on the provided single image. # The hand landmarker must be created with the video mode. hand_landmarker_result = landmarker.detect_for_video(mp_image, frame_timestamp_ms)
直播
# Send live image data to perform hand landmarks detection. # The results are accessible via the `result_callback` provided in # the `HandLandmarkerOptions` object. # The hand landmarker must be created with the live stream mode. landmarker.detect_async(mp_image, frame_timestamp_ms)
注意事項:
- 在影片模式或直播模式中執行時,您也必須為手勢標記器工作提供輸入影格時間戳記。
- 在圖片或影片模型中執行時,手部標記器工作會阻斷目前執行緒,直到處理完輸入圖片或影格為止。
- 在直播模式下執行時,手部標記器工作不會阻斷目前的執行緒,而是立即傳回。每次處理完輸入影格後,它都會使用偵測結果叫用結果監聽器。如果在手勢標記器工作忙於處理其他影格時呼叫偵測函式,工作會忽略新的輸入影格。
如需在圖片上執行手部標記的完整範例,請參閱程式碼範例。
處理及顯示結果
Hand Landmarker 會為每次偵測執行作業產生手部標記結果物件。結果物件包含圖片座標中的手標記、世界座標中的手標記,以及所偵測手部的慣用手(左手/右手)。
以下是這項工作的輸出資料範例:
HandLandmarkerResult 輸出內容包含三個元件。每個元件都是陣列,其中每個元素都包含單一偵測到的手的下列結果:
慣用手
慣用手代表偵測到的手是左手還是右手。
地標
手部有 21 個地標,每個地標都由
x、y和z座標組成。x和y座標會分別根據圖片寬度和高度,正規化為 [0.0, 1.0]。z座標代表地標深度,其中手腕的深度為原點。值越小,地標與相機的距離就越近。z的大小會使用與x大致相同的刻度。世界著名地標
21 個手部地標也會以世界座標呈現。每個地標都由
x、y和z組成,代表以公尺為單位的實際 3D 座標,起點位於手的幾何中心。
HandLandmarkerResult:
Handedness:
Categories #0:
index : 0
score : 0.98396
categoryName : Left
Landmarks:
Landmark #0:
x : 0.638852
y : 0.671197
z : -3.41E-7
Landmark #1:
x : 0.634599
y : 0.536441
z : -0.06984
... (21 landmarks for a hand)
WorldLandmarks:
Landmark #0:
x : 0.067485
y : 0.031084
z : 0.055223
Landmark #1:
x : 0.063209
y : -0.00382
z : 0.020920
... (21 world landmarks for a hand)
下圖是工作輸出內容的視覺化呈現:
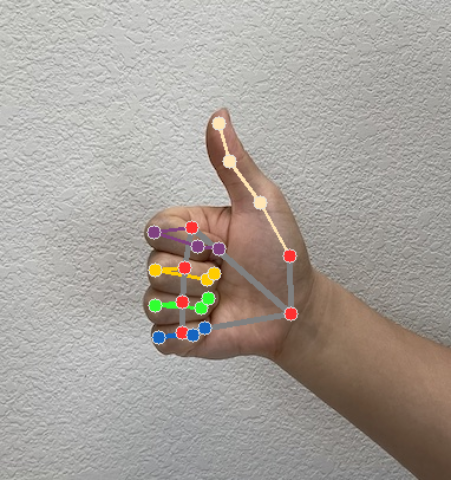
手部地標程式碼範例說明如何顯示工作傳回的結果,請參閱程式碼範例瞭解詳情。