
Mit der MediaPipe-Objekterkennungsaufgabe können Sie die Anwesenheit und den Standort mehrerer Objektklassen erkennen. In dieser Anleitung erfahren Sie, wie Sie die Aufgabe „Objekterkennung“ in Python verwenden. Das in dieser Anleitung beschriebene Codebeispiel ist auf GitHub verfügbar.
In der Web-Demo können Sie sich diese Aufgabe in Aktion ansehen. Weitere Informationen zu den Funktionen, Modellen und Konfigurationsoptionen dieser Aufgabe finden Sie in der Übersicht.
Codebeispiel
Der Beispielcode für den Objektdetektor enthält eine vollständige Implementierung dieser Aufgabe in Python. Mit diesem Code können Sie diese Aufgabe testen und mit dem Erstellen Ihrer eigenen App zur Textklassifizierung beginnen. Sie können den Beispielcode für den Objektdetektor ganz einfach in Ihrem Webbrowser aufrufen, ausführen und bearbeiten.
Wenn Sie den Objekterkennungs-API für Raspberry Pi implementieren, lesen Sie die Beispiel-App für Raspberry Pi.
Einrichtung
In diesem Abschnitt werden die wichtigsten Schritte zum Einrichten Ihrer Entwicklungsumgebung und zum Erstellen von Codeprojekten beschrieben, die speziell für die Verwendung des Objekterkennungsdienstes geeignet sind. Allgemeine Informationen zum Einrichten Ihrer Entwicklungsumgebung für die Verwendung von MediaPipe-Aufgaben, einschließlich Anforderungen an die Plattformversion, finden Sie im Einrichtungshandbuch für Python.
Pakete
Für die Aufgabe „Object Detector“ ist das PIP-Paket „mediapipe“ erforderlich. Sie können die erforderlichen Pakete mit den folgenden Befehlen installieren:
$ python -m pip install mediapipe
Importe
Importieren Sie die folgenden Klassen, um auf die Aufgabenfunktionen des Objekterkennungsdiensts zuzugreifen:
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
Modell
Für die MediaPipe Object Detection-Aufgabe ist ein trainiertes Modell erforderlich, das mit dieser Aufgabe kompatibel ist. Weitere Informationen zu verfügbaren trainierten Modellen für den Objektdetektor finden Sie in der Aufgabenübersicht im Abschnitt „Modelle“.
Wählen Sie ein Modell aus, laden Sie es herunter und speichern Sie es in einem lokalen Verzeichnis:
model_path = '/absolute/path/to/lite-model_efficientdet_lite0_detection_metadata_1.tflite'
Verwenden Sie den Parameter BaseOptions object model_asset_path, um den Pfad des zu verwendenden Modells anzugeben. Ein Codebeispiel finden Sie im nächsten Abschnitt.
Aufgabe erstellen
Verwenden Sie die Funktion create_from_options, um die Aufgabe zu erstellen. Die Funktion create_from_options akzeptiert Konfigurationsoptionen wie den Ausführungsmodus, die Sprache für die Anzeige von Namen, die maximale Anzahl von Ergebnissen, den Konfidenzgrenzwert, die Zulassungsliste und die Sperrliste für Kategorien. Wenn Sie keine Konfigurationsoption festlegen, wird für die Aufgabe der Standardwert verwendet. Weitere Informationen zu den Konfigurationsoptionen finden Sie im Abschnitt Konfigurationsoptionen.
Die Aufgabe „Objekterkennung“ unterstützt mehrere Eingabedatentypen: Standbilder, Videodateien und Live-Videostreams. Wählen Sie den Tab für den Datentyp Ihrer Eingabedaten aus, um zu erfahren, wie Sie die Aufgabe erstellen und die Inferenz ausführen.
Bild
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions ObjectDetector = mp.tasks.vision.ObjectDetector ObjectDetectorOptions = mp.tasks.vision.ObjectDetectorOptions VisionRunningMode = mp.tasks.vision.RunningMode options = ObjectDetectorOptions( base_options=BaseOptions(model_asset_path='/path/to/model.tflite'), max_results=5, running_mode=VisionRunningMode.IMAGE) with ObjectDetector.create_from_options(options) as detector: # The detector is initialized. Use it here. # ...
Video
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions ObjectDetector = mp.tasks.vision.ObjectDetector ObjectDetectorOptions = mp.tasks.vision.ObjectDetectorOptions VisionRunningMode = mp.tasks.vision.RunningMode options = ObjectDetectorOptions( base_options=BaseOptions(model_asset_path='/path/to/model.tflite'), max_results=5, running_mode=VisionRunningMode.VIDEO) with ObjectDetector.create_from_options(options) as detector: # The detector is initialized. Use it here. # ...
Livestream
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions DetectionResult = mp.tasks.components.containers.detections.DetectionResult ObjectDetector = mp.tasks.vision.ObjectDetector ObjectDetectorOptions = mp.tasks.vision.ObjectDetectorOptions VisionRunningMode = mp.tasks.vision.RunningMode def print_result(result: DetectionResult, output_image: mp.Image, timestamp_ms: int): print('detection result: {}'.format(result)) options = ObjectDetectorOptions( base_options=BaseOptions(model_asset_path='/path/to/model.tflite'), running_mode=VisionRunningMode.LIVE_STREAM, max_results=5, result_callback=print_result) with ObjectDetector.create_from_options(options) as detector: # The detector is initialized. Use it here. # ...
Ein vollständiges Beispiel zum Erstellen eines Objekterkennungstools für die Verwendung mit einem Bild finden Sie im Codebeispiel.
Konfigurationsoptionen
Für diese Aufgabe gibt es die folgenden Konfigurationsoptionen für Python-Anwendungen:
| Option | Beschreibung | Wertebereich | Standardwert |
|---|---|---|---|
running_mode |
Legt den Ausführungsmodus für die Aufgabe fest. Es gibt drei Modi: IMAGE: Der Modus für Eingaben mit einem einzelnen Bild. VIDEO: Der Modus für decodierte Frames eines Videos. LIVE_STREAM: Der Modus für einen Livestream von Eingabedaten, z. B. von einer Kamera. In diesem Modus muss resultListener aufgerufen werden, um einen Listener für den asynchronen Empfang von Ergebnissen einzurichten. |
{IMAGE, VIDEO, LIVE_STREAM} |
IMAGE |
display_names |
Legt die Sprache der Labels fest, die für die Anzeigenamen verwendet werden, die in den Metadaten des Modells der Aufgabe angegeben sind, sofern verfügbar. Der Standardwert ist en für Englisch. Mit der TensorFlow Lite Metadata Writer API können Sie den Metadaten eines benutzerdefinierten Modells lokalisierte Labels hinzufügen.
|
Gebietscode | de |
max_results |
Legt die optionale maximale Anzahl der Erkennungsergebnisse mit der höchsten Punktzahl fest, die zurückgegeben werden sollen. | Beliebige positive Zahlen | -1 (alle Ergebnisse werden zurückgegeben) |
score_threshold |
Legt den Schwellenwert für die Vorhersagebewertung fest, der den in den Modellmetadaten angegebenen Wert (falls vorhanden) überschreibt. Ergebnisse unter diesem Wert werden abgelehnt. | Beliebiger Float | Nicht festgelegt |
category_allowlist |
Legt die optionale Liste der zulässigen Kategorienamen fest. Wenn die Liste nicht leer ist, werden Erkennungsergebnisse herausgefiltert, deren Kategoriename nicht in dieser Liste enthalten ist. Doppelte oder unbekannte Kategorienamen werden ignoriert.
Diese Option schließt category_denylist aus. Die Verwendung beider Optionen führt zu einem Fehler. |
Beliebige Strings | Nicht festgelegt |
category_denylist |
Hiermit wird eine optionale Liste der nicht zulässigen Kategorienamen festgelegt. Wenn der String nicht leer ist, werden Erkennungsergebnisse herausgefiltert, deren Kategoriename in diesem Set enthalten ist. Doppelte oder unbekannte Kategorienamen werden ignoriert. Diese Option schließt category_allowlist aus. Die Verwendung beider Optionen führt zu einem Fehler. |
Beliebige Strings | Nicht festgelegt |
Daten vorbereiten
Bereiten Sie Ihre Eingabe als Bilddatei oder als Numpy-Array vor und wandeln Sie sie dann in ein mediapipe.Image-Objekt um. Wenn Ihre Eingabe eine Videodatei oder ein Livestream von einer Webcam ist, können Sie eine externe Bibliothek wie OpenCV verwenden, um die Eingabeframes als Numpy-Arrays zu laden.
In den folgenden Beispielen wird für jeden der verfügbaren Datentypen erläutert und gezeigt, wie Daten für die Verarbeitung vorbereitet werden:
Bild
import mediapipe as mp # Load the input image from an image file. mp_image = mp.Image.create_from_file('/path/to/image') # Load the input image from a numpy array. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_image)
Video
import mediapipe as mp # Use OpenCV’s VideoCapture to load the input video. # Load the frame rate of the video using OpenCV’s CV_CAP_PROP_FPS # You’ll need it to calculate the timestamp for each frame. # Loop through each frame in the video using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
Livestream
import mediapipe as mp # Use OpenCV’s VideoCapture to start capturing from the webcam. # Create a loop to read the latest frame from the camera using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
Aufgabe ausführen
Sie können eine der Erkennungsfunktionen aufrufen, um Inferenzen auszulösen. Die Aufgabe „ObjectDetector“ gibt die im Eingabebild oder -Frame erkannten Objekte zurück.
Bild
# Perform object detection on the provided single image. detection_result = detector.detect(mp_image)
Video
# Calculate the timestamp of the current frame frame_timestamp_ms = 1000 * frame_index / video_file_fps # Perform object detection on the video frame. detection_result = detector.detect_for_video(mp_image, frame_timestamp_ms)
Livestream
# Send the latest frame to perform object detection. # Results are sent to the `result_callback` provided in the `ObjectDetectorOptions`. detector.detect_async(mp_image, frame_timestamp_ms)
Ein vollständiges Beispiel für die Ausführung eines Objekterkennungstools auf einem Bild finden Sie im Codebeispiel.
Wichtige Hinweise:
- Wenn Sie die Erkennung im Video- oder Livestream-Modus ausführen, müssen Sie der Objekterkennungsaufgabe auch den Zeitstempel des Eingabeframes angeben.
- Wenn die Ausführung im Bild- oder Videomodell erfolgt, blockiert die Objekterkennungsaufgabe den aktuellen Thread, bis die Verarbeitung des Eingabebilds oder ‑frames abgeschlossen ist.
- Wenn die Ausführung im Livestream-Modus erfolgt, blockiert die Aufgabe „Object Detector“ den aktuellen Thread nicht, sondern gibt sofort eine Rückgabe zurück. Jedes Mal, wenn die Verarbeitung eines Eingabeframes abgeschlossen ist, wird der Ergebnis-Listener mit dem Erkennungsergebnis aufgerufen. Wenn die Funktion „detect“ aufgerufen wird, während die Aufgabe „Object Detector“ gerade einen anderen Frame verarbeitet, wird der neue Eingabeframe ignoriert.
Ergebnisse verarbeiten und anzeigen
Nach der Ausführung der Inferenz gibt die Aufgabe „Object Detector“ ein ObjectDetectionResult-Objekt zurück, das die im Eingabebild gefundenen Objekte beschreibt.
Im Folgenden finden Sie ein Beispiel für die Ausgabedaten dieser Aufgabe:
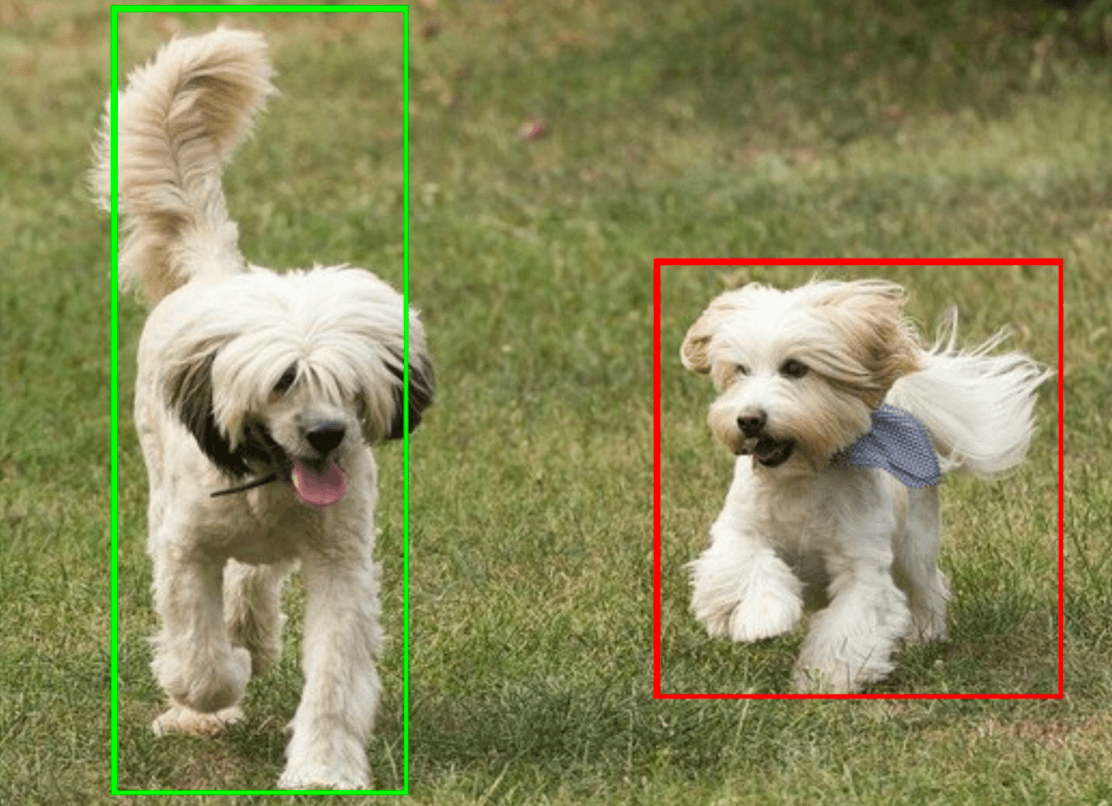
ObjectDetectorResult:
Detection #0:
Box: (x: 355, y: 133, w: 190, h: 206)
Categories:
index : 17
score : 0.73828
class name : dog
Detection #1:
Box: (x: 103, y: 15, w: 138, h: 369)
Categories:
index : 17
score : 0.73047
class name : dog
Die folgende Abbildung zeigt eine Visualisierung der Aufgabenausgabe:
Im Beispielcode für den Objektdetektor wird gezeigt, wie die von der Aufgabe zurückgegebenen Erkennungsergebnisse angezeigt werden. Weitere Informationen finden Sie im Codebeispiel.