
Задача MediaPipe Hand Landmarker позволяет обнаруживать ориентиры рук на изображении. Эти инструкции покажут вам, как использовать Hand Landmarker с Python. Пример кода, описанный в этой инструкции, доступен на GitHub .
Дополнительные сведения о возможностях, моделях и параметрах конфигурации этой задачи см. в разделе Обзор .
Пример кода
Пример кода Hand Landmarker предоставляет вам полную реализацию этой задачи на Python. Этот код поможет вам протестировать эту задачу и приступить к созданию собственного детектора ориентиров. Вы можете просматривать, запускать и редактировать пример кода Hand Landmarker, используя только веб-браузер.
Если вы реализуете Hand Landmarker для Raspberry Pi, обратитесь к примеру приложения Raspberry Pi .
Настраивать
В этом разделе описаны ключевые шаги по настройке среды разработки и проектов кода специально для использования Hand Landmarker. Общие сведения о настройке среды разработки для использования задач MediaPipe, включая требования к версии платформы, см. в руководстве по настройке Python .
Пакеты
Для задачи MediaPipe Hand Landmarker требуется пакет mediapipe PyPI. Вы можете установить и импортировать эти зависимости следующим образом:
$ python -m pip install mediapipe
Импорт
Импортируйте следующие классы для доступа к функциям задачи Hand Landmarker:
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
Модель
Для задачи MediaPipe Hand Landmarker требуется обученная модель, совместимая с этой задачей. Дополнительную информацию о доступных обученных моделях для Hand Landmarker смотрите в разделе «Модели обзора задач».
Выберите и скачайте модель, а затем сохраните ее в локальном каталоге:
model_path = '/absolute/path/to/gesture_recognizer.task'
Используйте параметр model_asset_path объекта BaseOptions , чтобы указать путь к используемой модели. Пример кода см. в следующем разделе.
Создать задачу
Задача MediaPipe Hand Landmarker использует функцию create_from_options для настройки задачи. Функция create_from_options принимает значения для обрабатываемых параметров конфигурации. Дополнительные сведения о параметрах конфигурации см. в разделе Параметры конфигурации .
Следующий код демонстрирует, как создать и настроить эту задачу.
В этих примерах также показаны варианты построения задач для изображений, видеофайлов и прямой трансляции.
Изображение
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions HandLandmarker = mp.tasks.vision.HandLandmarker HandLandmarkerOptions = mp.tasks.vision.HandLandmarkerOptions VisionRunningMode = mp.tasks.vision.RunningMode # Create a hand landmarker instance with the image mode: options = HandLandmarkerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.IMAGE) with HandLandmarker.create_from_options(options) as landmarker: # The landmarker is initialized. Use it here. # ...
Видео
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions HandLandmarker = mp.tasks.vision.HandLandmarker HandLandmarkerOptions = mp.tasks.vision.HandLandmarkerOptions VisionRunningMode = mp.tasks.vision.RunningMode # Create a hand landmarker instance with the video mode: options = HandLandmarkerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.VIDEO) with HandLandmarker.create_from_options(options) as landmarker: # The landmarker is initialized. Use it here. # ...
Прямая трансляция
import mediapipe as mp BaseOptions = mp.tasks.BaseOptions HandLandmarker = mp.tasks.vision.HandLandmarker HandLandmarkerOptions = mp.tasks.vision.HandLandmarkerOptions HandLandmarkerResult = mp.tasks.vision.HandLandmarkerResult VisionRunningMode = mp.tasks.vision.RunningMode # Create a hand landmarker instance with the live stream mode: def print_result(result: HandLandmarkerResult, output_image: mp.Image, timestamp_ms: int): print('hand landmarker result: {}'.format(result)) options = HandLandmarkerOptions( base_options=BaseOptions(model_asset_path='/path/to/model.task'), running_mode=VisionRunningMode.LIVE_STREAM, result_callback=print_result) with HandLandmarker.create_from_options(options) as landmarker: # The landmarker is initialized. Use it here. # ...
Полный пример создания Hand Landmarker для использования с изображением см. в примере кода .
Варианты конфигурации
Эта задача имеет следующие параметры конфигурации для приложений Python:
| Название опции | Описание | Диапазон значений | Значение по умолчанию |
|---|---|---|---|
running_mode | Устанавливает режим выполнения задачи. Есть три режима: ИЗОБРАЖЕНИЕ: Режим для ввода одного изображения. ВИДЕО: Режим декодированных кадров видео. LIVE_STREAM: режим прямой трансляции входных данных, например с камеры. В этом режиме необходимо вызвать resultListener, чтобы настроить прослушиватель на асинхронное получение результатов. | { IMAGE, VIDEO, LIVE_STREAM } | IMAGE |
num_hands | Максимальное количество рук, обнаруженных детектором ориентиров рук. | Any integer > 0 | 1 |
min_hand_detection_confidence | Минимальный показатель достоверности, позволяющий считать обнаружение рук успешным в модели обнаружения ладоней. | 0.0 - 1.0 | 0.5 |
min_hand_presence_confidence | Минимальная оценка достоверности для оценки присутствия руки в модели обнаружения ориентиров руки. В режиме видео и режиме прямой трансляции, если показатель достоверности присутствия руки из модели ориентира руки ниже этого порога, Hand Landmarker запускает модель обнаружения ладони. В противном случае упрощенный алгоритм отслеживания рук определяет местоположение руки (рук) для последующего обнаружения ориентиров. | 0.0 - 1.0 | 0.5 |
min_tracking_confidence | Минимальный показатель достоверности, позволяющий считать отслеживание рук успешным. Это порог IoU ограничивающей рамки между руками в текущем кадре и последнем кадре. В режиме видео и потоковом режиме Hand Landmarker, если отслеживание не удается, Hand Landmarker запускает обнаружение руки. В противном случае обнаружение руки будет пропущено. | 0.0 - 1.0 | 0.5 |
result_callback | Настраивает прослушиватель результатов на асинхронное получение результатов обнаружения, когда ручной ориентир находится в режиме прямой трансляции. Применимо только в том случае, если для режима работы установлено значение LIVE_STREAM | Н/Д | Н/Д |
Подготовьте данные
Подготовьте входные данные в виде файла изображения или массива numpy, а затем преобразуйте их в объект mediapipe.Image . Если ваши входные данные представляют собой видеофайл или прямую трансляцию с веб-камеры, вы можете использовать внешнюю библиотеку, такую как OpenCV, для загрузки входных кадров в виде числовых массивов.
Изображение
import mediapipe as mp # Load the input image from an image file. mp_image = mp.Image.create_from_file('/path/to/image') # Load the input image from a numpy array. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_image)
Видео
import mediapipe as mp # Use OpenCV’s VideoCapture to load the input video. # Load the frame rate of the video using OpenCV’s CV_CAP_PROP_FPS # You’ll need it to calculate the timestamp for each frame. # Loop through each frame in the video using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
Прямая трансляция
import mediapipe as mp # Use OpenCV’s VideoCapture to start capturing from the webcam. # Create a loop to read the latest frame from the camera using VideoCapture#read() # Convert the frame received from OpenCV to a MediaPipe’s Image object. mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=numpy_frame_from_opencv)
Запустить задачу
Hand Landmarker использует функции обнаружения, обнаружения_для_видео и обнаружения_async для инициирования выводов. Для обнаружения ориентиров рук это включает предварительную обработку входных данных, обнаружение рук на изображении и обнаружение ориентиров рук.
Следующий код демонстрирует, как выполнить обработку с помощью модели задачи.
Изображение
# Perform hand landmarks detection on the provided single image. # The hand landmarker must be created with the image mode. hand_landmarker_result = landmarker.detect(mp_image)
Видео
# Perform hand landmarks detection on the provided single image. # The hand landmarker must be created with the video mode. hand_landmarker_result = landmarker.detect_for_video(mp_image, frame_timestamp_ms)
Прямая трансляция
# Send live image data to perform hand landmarks detection. # The results are accessible via the `result_callback` provided in # the `HandLandmarkerOptions` object. # The hand landmarker must be created with the live stream mode. landmarker.detect_async(mp_image, frame_timestamp_ms)
Обратите внимание на следующее:
- При работе в режиме видео или режиме прямой трансляции вы также должны предоставить задаче Hand Landmarker временную метку входного кадра.
- При запуске изображения или видеомодели задача Hand Landmarker блокирует текущий поток до тех пор, пока он не завершит обработку входного изображения или кадра.
- При работе в режиме прямой трансляции задача Hand Landmarker не блокирует текущий поток, а немедленно возвращается. Он будет вызывать свой прослушиватель результатов с результатом обнаружения каждый раз, когда завершает обработку входного кадра. Если функция обнаружения вызывается, когда задача Hand Landmarker занята обработкой другого кадра, задача будет игнорировать новый входной кадр.
Полный пример использования Hand Landmarker на изображении см. в примере кода .
Обработка и отображение результатов
Hand Landmarker генерирует объект результата ручного ориентира для каждого запуска обнаружения. Объект результата содержит ориентиры рук в координатах изображения, ориентиры рук в мировых координатах и направление руки (левая/правая) обнаруженных рук.
Ниже показан пример выходных данных этой задачи:
Выходные данные HandLandmarkerResult содержат три компонента. Каждый компонент представляет собой массив, где каждый элемент содержит следующие результаты для одной обнаруженной руки:
Рукава
Handedness показывает, являются ли обнаруженные руки левыми или правыми.
Достопримечательности
Имеется 21 ручной ориентир, каждый из которых состоит из координат
x,yиz. Координатыxиyнормализуются на [0,0, 1,0] по ширине и высоте изображения соответственно. Координатаzпредставляет глубину ориентира, при этом глубина на запястье является началом координат. Чем меньше значение, тем ближе ориентир к камере. Величинаzиспользует примерно тот же масштаб, что иx.Достопримечательности мира
21 ориентир также представлен в мировых координатах. Каждый ориентир состоит из
x,yиz, представляющих реальные трехмерные координаты в метрах с началом координат в геометрическом центре руки.
HandLandmarkerResult:
Handedness:
Categories #0:
index : 0
score : 0.98396
categoryName : Left
Landmarks:
Landmark #0:
x : 0.638852
y : 0.671197
z : -3.41E-7
Landmark #1:
x : 0.634599
y : 0.536441
z : -0.06984
... (21 landmarks for a hand)
WorldLandmarks:
Landmark #0:
x : 0.067485
y : 0.031084
z : 0.055223
Landmark #1:
x : 0.063209
y : -0.00382
z : 0.020920
... (21 world landmarks for a hand)
На следующем изображении показана визуализация результатов задачи:
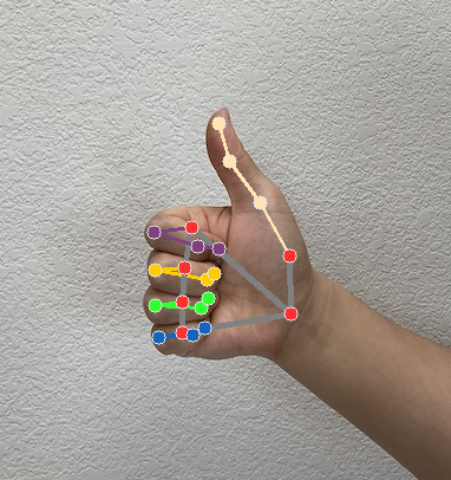
Пример кода Hand Landmarker демонстрирует, как отображать результаты, возвращаемые задачей, подробности см. в примере кода .