
Детекторы объектов могут определять, какие из известного набора объектов могут присутствовать на изображении или в видеопотоке, и предоставлять информацию об их положении на данном изображении или в видеопотоке. Детектор объектов обучается обнаруживать наличие и местоположение объектов нескольких классов. Например, модель может быть обучена на изображениях, содержащих различные фрукты, вместе с меткой , указывающей класс фруктов, которые они представляют (например, яблоко, банан или клубника), и данными, указывающими местонахождение каждого объекта на изображении. Подробнее о детекторах объектов см. в примере обнаружения объектов.
Используйте API ObjectDetector библиотеки задач для развертывания собственных или предварительно обученных детекторов объектов в мобильных приложениях.
Основные возможности API ObjectDetector
Обработка входных изображений, включая поворот, изменение размера и преобразование цветового пространства.
Метка карты местоположения.
Пороговое значение для фильтрации результатов.
Результаты обнаружения Top-k.
Белый список и запрещенный список меток.
Поддерживаемые модели детекторов объектов
Следующие модели гарантированно совместимы с API ObjectDetector .
Предварительно обученные модели обнаружения объектов на TensorFlow Hub .
Модели, созданные с помощью AutoML Vision Edge Object Detection .
Модели, созданные TensorFlow Lite Model Maker для детектора объектов .
Пользовательские модели, отвечающие требованиям совместимости моделей .
Выполнение вывода на Java
Пример использования ObjectDetector в приложении для Android см. в справочном приложении Object Detector .
Шаг 1: Импорт зависимости Gradle и других настроек
Скопируйте файл модели .tflite в каталог ресурсов модуля Android, где он будет запущен. Укажите, что файл не нужно сжимать, и добавьте библиотеку TensorFlow Lite в файл build.gradle модуля:
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
Шаг 2: Использование модели
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
Дополнительные параметры настройки ObjectDetector см. в исходном коде и javadoc .
Выполнить вывод в iOS
Шаг 1: Установка зависимостей
Библиотека задач поддерживает установку с помощью CocoaPods. Убедитесь, что CocoaPods установлен в вашей системе. Инструкции см. в руководстве по установке CocoaPods .
Подробную информацию о добавлении модулей в проект Xcode см. в руководстве CocoaPods .
Добавьте модуль TensorFlowLiteTaskVision в файл Podfile.
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
Убедитесь, что модель .tflite , которую вы будете использовать для вывода, присутствует в вашем пакете приложения.
Шаг 2: Использование модели
Быстрый
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objective-C
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
Дополнительные параметры настройки TFLObjectDetector см. в исходном коде .
Выполнить вывод на Python
Шаг 1: Установка пакета pip
pip install tflite-support
Шаг 2: Использование модели
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
Дополнительные параметры настройки ObjectDetector см. в исходном коде .
Выполнить вывод в C++
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
Дополнительные параметры настройки ObjectDetector см. в исходном коде .
Примеры результатов
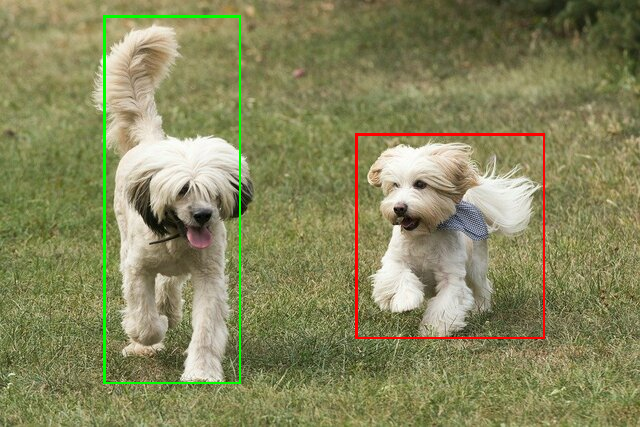
Вот пример результатов обнаружения ssd mobilenet v1 от TensorFlow Hub.

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
Визуализируйте ограничивающие рамки на входном изображении:
Попробуйте простой демонстрационный инструмент CLI для ObjectDetector с вашей собственной моделью и тестовыми данными.
Требования к совместимости моделей
API ObjectDetector ожидает модель TFLite с обязательными метаданными модели TFLite . См. примеры создания метаданных для детекторов объектов с помощью API TensorFlow Lite Metadata Writer .
Совместимые модели детекторов объектов должны соответствовать следующим требованиям:
Входной тензор изображения: (kTfLiteUInt8/kTfLiteFloat32)
- ввод изображения размером
[batch x height x width x channels]. - вывод партии не поддерживается (
batchдолжна быть равна 1). - Поддерживаются только входы RGB (требуется 3
channels). - если тип — kTfLiteFloat32, то для нормализации входных данных необходимо прикрепить NormalizationOptions к метаданным.
- ввод изображения размером
Выходные тензоры должны быть 4 выходами операции
DetectionPostProcess, то есть:- Тензор местоположений (kTfLiteFloat32)
- тензор размером
[1 x num_results x 4], внутренний массив, представляющий ограничивающие рамки в форме [верх, лево, право, низ]. - Свойства BoundingBoxProperties должны быть прикреплены к метаданным и должны указывать
type=BOUNDARIESи `coordinate_type=RATIO. Тензор классов (kTfLiteFloat32)
тензор размером
[1 x num_results], каждое значение которого представляет собой целочисленный индекс класса.Необязательно (но рекомендуется) прикреплять карты меток как AssociatedFile-ы с типом TENSOR_VALUE_LABELS, содержащие по одной метке на строку. См. пример файла меток . Первый такой AssociatedFile (если есть) используется для заполнения поля
class_nameрезультатов. Полеdisplay_nameзаполняется из AssociatedFile (если есть), локаль которого совпадает с полемdisplay_names_localeпараметраObjectDetectorOptionsиспользуемого при создании (по умолчанию «en», т.е. английский). Если ни один из этих параметров недоступен, будет заполнено только полеindexрезультатов.Тензор оценок (kTfLiteFloat32)
Тензор размером
[1 x num_results], каждое значение которого представляет оценку обнаруженного объекта.Номер тензора обнаружения (kTfLiteFloat32)
целое число num_results как тензор размера
[1].